Executive Summary
LCO's Network of Robotic Echelle Spectrographs (NRES) is four identical high-resolution (R~53,000), precise (≤ 3 m/s), optical (380-860 nm) echelle spectrographs, each fiber-fed (2.58" per fiber width) simultaneously by two 1 meter telescopes and a ThAr calibration source. NRES is a single, globally-distributed observing facility, composed of four units located at our CTIO, SAAO, McDonald Observatory, and Wise Observatory sites. The NRES units can be configured to use one of two 1-m telescopes at the CTIO, SAAO, and McDonald sites.
We have received considerable support for NRES through NSF MRI (AST-1229720) and ATI (1407666 & 1508464) grants. The spectrographs were commissioned in 2017.
Scientific Motivation
The primary motivation for NRES is to study exoplanets. NRES roughly doubled the radial velocity (RV) planet-vetting capacity nationwide and achieves accuracy of ~ 10 m/s with a goal of 3 m/s in reasonable exposure times for stars brighter than V = 12, enabling a large variety of planetary studies.
Spectroscopic Vetting of Transiting-Planet Candidates
Ground-based transiting planet searches produce hundreds of transiting planet candidates per year, but many of these are “astrophysical false positives” – binary or multiple stars masquerading as planets. In space, the CoRoT (Baglin et al., 2006) and Kepler (Borucki et al., 2003) missions have located thousands of candidates, but they also produced a significant fraction of false positives. The Transiting Exoplanet Survey Satellite, TESS (Ricker et al., 2010), is producing an all-sky catalog containing an estimated 20,000 planet candidates circling bright (V ≲ 12.5) stars.
Separating planets from false positives is efficiently done with (and often demands) RV measurements, to distinguish the reflex velocities of planets (typically m/s) from the velocities of stellar binaries (typically km/s). Moreover, knowing the mass, radius, and temperature of an exoplanet depends on knowing the same physical properties of its parent star. This requires spectroscopic classification of the star to yield Teff, log g, metallicity, and v sin i. Accurate classification is also necessary to exclude blended false positive scenarios (Torres et al., 2011). NRES provides an efficient, uniform, automated source of spectra for stellar classification and RV vetting.
Precise RV Follow-up of Known Planets
Once planets (transiting or not) have been detected, continued precise spectroscopic follow-up is needed if the mass and orbital properties of the planets are to be known. Because multi-planet systems are common (e.g., Marcy et al., 2008; Lissauer et al., 2011), it is very desirable to maintain long-term RV monitoring of systems with known planets, to characterize any planetary siblings. NRES supports a program of long-term RV monitoring of a large selected sample of planet-bearing stars, with an accuracy adequate to study Neptune-mass planets in small orbits.
RV jitter: physical processes and possible amelioration
Many stars have higher-than-solar levels of magnetic activity (Basri et al., 2010). Planets orbiting such stars are difficult to follow up in the usual ways because their hosts suffer from radial velocity "jitter". It may be possible to improve this situation by combining conventional RV data with diagnostics of stellar spots (e.g., Ca II K-line core intensity, Doppler imaging of starspots, or simultaneous multicolor photometry). To date, several workers have investigated this question, but with only modest success (e.g., Saar and Fischer, 2000). Repeated observations with a relatively high time cadence (several observations per day) might however provide a point of entry. To enable such efforts, NRES provides one-shot spectrum coverage from the Ca II H and K lines to the Ca II IR triplet (i.e., 380-860 nm). Such capability is a direct response to the 2010 Decadal Survey (Committee for a Decadal Survey of Astronomy and Astrophysics; National Research Council, 2010) mandate to pursue "...the aggressive development of ground-based high-precision radial velocity surveys of nearby stars at optical and near-infrared wavelengths (including efforts to determine the effects of stellar activity on these measurements)."
Spectrograph Design
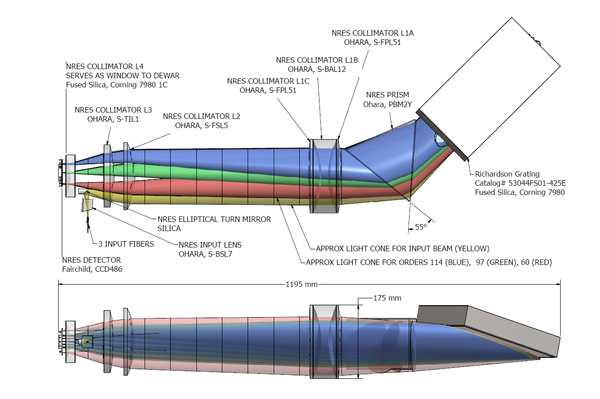
Each NRES spectrograph is fiber-fed simultaneously by two 1-meter telescopes and a thorium argon (ThAr) calibration source. The fiber feeds are mounted on their respective telescopes to provide on-axis guiding and to direct calibration light into "star" fibers. The fibers have octagonal cores for improved illumination stability (Brown et al. 1990, Bouchy, et al. 2013); they are 67 µm edge-to-edge, corresponding to 2.77 arcsec on the sky when fed with a reimaged f/5 beam from the telescope. The spectrograph’s optical design, produced by Dr. Stuart Barnes, gives almost full wavelength coverage between 380 nm and 860 nm, with typical spectral resolution of 48,000, and 4.47 pixels per fiber width. The optical/mechanical layout of the NRES spectrograph is shown in the photo below. The design uses an R4 echelle grating (41.6 l/mm, size 165 x 320 mm, from Newport) as the main dispersing element, with cross-dispersion from a 55-degree prism of PBM2Y glass. The 5-element all-refracting lens system serves as both collimator and camera. The science detector is a Fairchild 486 4Kx4K CCD, with 15um pixels. The CCD controller is a minor modification to a device designed and built at LCO for use in our ``Sinistro'' imaging instrument (Brown, et al. 2013). The spectrograph is bench-mounted in a temperature- and pressure-controlled chamber, itself located in an air-conditioned room, nicknamed the "Igloo", adjacent to the 1-m telescope domes. The average telescope-spectrograph fiber run is approximately 25 m.
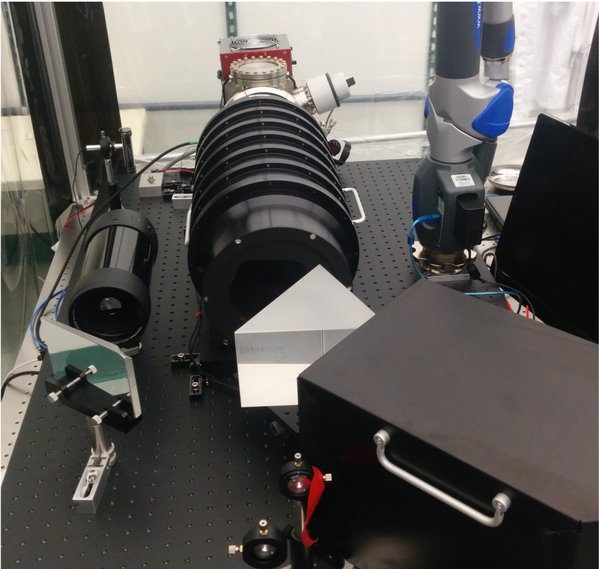
Above: NRES in a clean room at LCO headquarters. The cylinder on the left is the exposure meter. The larger, ribbed cylinder in the center is the collimator for the CCD camera. The CCD controller is the red cube near the top of the photo. The echelle grating is inside the black box in the lower-right corner.
Optical Design
We adopted an optical design that is both simple and conventional in its general approach, being similar in concept to spectrographs designed for the Palomar East Arm Echelle (Libbrecht and Peri, 1995), the Lick Automated Planet Finder (Radovan et al., 2010), the Carnegie Planet Finder Spectrograph (Crane et al., 2006), SOPHIE (Perruchot et al., 2008), and the McDonald Observatory Sandiford Spectrograph (McCarthy et al., 1993).
We applied the design philosophy of these instruments to our 1-m feeds, with the aim of achieving very high optical throughput, wide wavelength coverage, and simultaneous fiber input from two telescopes. The spectrograph will have only one moving part – the shutter – inside its environmental chamber. By eliminating mechanisms necessary to adjust optics, we simplify the design, and (more importantly) assure a system that has great intrinsic stability.
Spectral Format
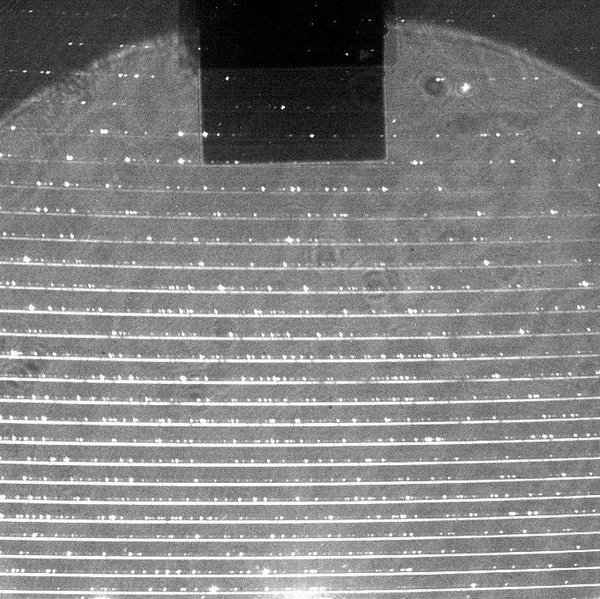
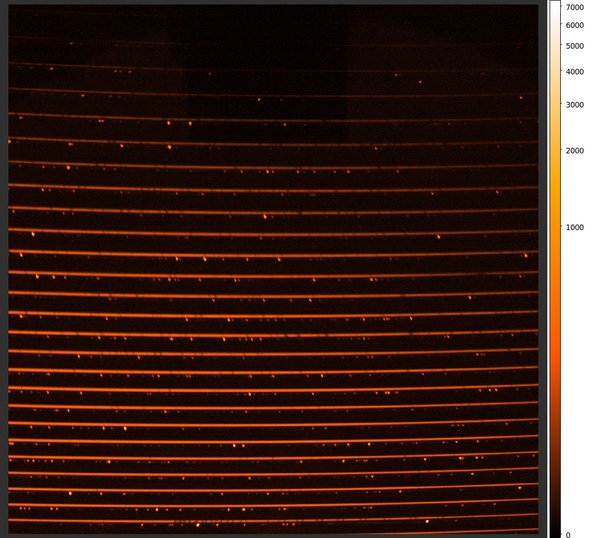
Above: a spectrum from the NRES prototype, installed on LCO's 0.8m telescope in the Sedgwick Reserve. The solid lines are the dispersed spectrum of HD 61421. The light blips beneath the solid lines are emission lines from the ThAr lamp. From left to right and top to bottom (like a book), the spectrum goes from blue to red.
A downloadable table containing approximate wavelength ranges per spectral order is available.
Detector
The CCD detectors used for NRES came from LCO’s stock of Fairchild 486 devices. These have 4K x 4K format with 15-micron square pixels, and are thinned and backside-illuminated with broadband antireflection coatings. Their quantum efficiency is 80% at 400 nm, peaks at 91% at 550 nm, and falls to 55% at 860 nm. The planned 62.5µm input fibers will be over-resolved by a factor of 4.15. Oversampling that is very desirable for precise radial velocity measurement.
To operate these detectors, LCO developed in-house an innovative and flexible controller (Tufts et al., 2008). This controller allows a wide range of formatting and readout speeds and other options, and adds almost no noise to the intrinsic CCD read noise. The goal is to achieve a read noise of about 7 e-/pixel at 1 MHz readout rate, requiring 16 s to read the full format. This is the same detector/controller that LCO uses for the standard imagers for our 1-m network.
Environmental Control
Variations in spectrograph temperature and in barometric pressure cause spurious Doppler shifts, which must be calibrated out. Since calibration works better if the instrumental shifts are small to begin with, we keep the spectrograph wavelength scale constant within 30 m/s before calibration. We place the spectrograph in an environmental chamber that maintains temperature stability of 0.01 C and constant barometric pressure within 0.2 mbar. These requirements are echoed in many spectrographs that aim to achieve similar precision to NRES. We elected to maintain the spectrograph environmental chamber at near-atmospheric pressure, using active control. We chose this solution over a vacuum one because it allows a lighter, less expensive, structure and because the control mechanisms for the needed accuracy have already been tested to be relatively inexpensive and reliable. We describe the thermal control system below.
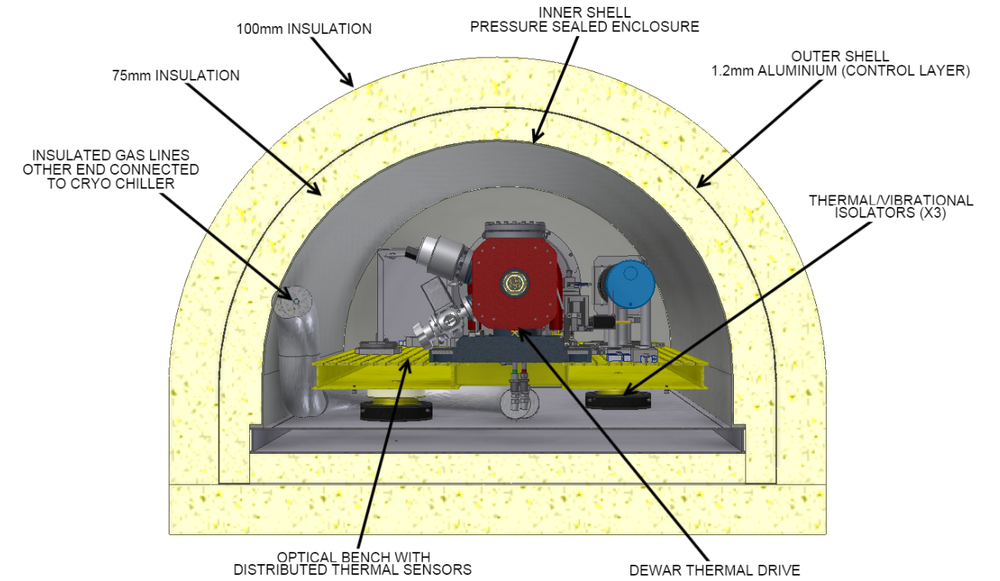
A multi-layer thermal control system is commonly used in high resolution spectrograph design. NRES’s environmental chamber consists of two nested aluminum shells, separated by an insulated gap. The outer shell insulated from the ambient air. The inner shell is relatively massive, sealed, and pressure-controlled. Its function is to hold the air inside at nearly-constant pressure (removing pressure variations from diurnal and weather-related processes) and to provide a long thermal time constant. This assures that the spectrograph doesn't undergo rapid temperature changes. The inner shell carries high-precision temperature sensors for monitoring performance, but it is not actively heated or cooled. The outer shell is a thin aluminium structure, also with multiple temperature sensors, but having heating elements bonded to it. The power to these elements is servo-controlled to keep the outer shell as nearly as possible at a constant temperature. We set the temperature 2� C above ambient, so that cooling is never required to maintain the desired outer box temperature.
Software
Our acquisition software uses astrometry.net (Lang et al., 2010) to solve the image coordinates robustly in ≲ 3 seconds. Pointing is adjusted iteratively to place a target onto a known pixel for efficient, robotic, spectroscopic acquisition. The analysis pipeline consists of modules for image calibration, spectrum extraction, flux and wavelength calibration, radial velocity determination, stellar classification, quality assurance, and interaction with the data archive. Extracted spectra and analysis results are stored in the LCO science archive.
See the NRES status update (1 June 2017).