This guide will give you a background to how astronomical CCDs and cameras work, how to choose an appropriate signal to noise ratio, and finally how to estimate a reasonable exposure time for your target.
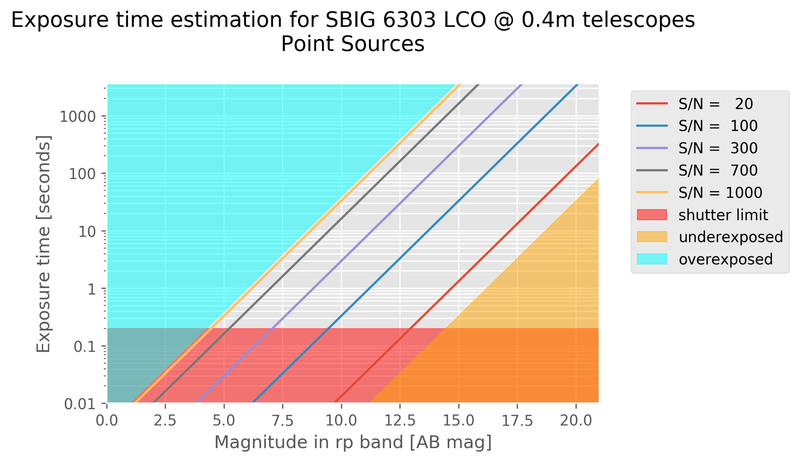
If you just want to look up an appropriate exposure time, please use the graph below.
1. Dynamical Range and Saturation Limit of SBIG camera
There are two factors governing the useful output range of a detector:
- The charge that a pixel can hold.
- The dynamical range of the analog to digital converter (ADC) in the CCD controller.
Let's have a look how these two effects work.
The full well
As a photon is absorbed in a CCD pixel, it is converted into an electron (photo effect). The pixel itself is usually defined by an isolating layer in one direction (usually the x, serial register direction), and by an electrical field in the other direction (usually y, parallel register direction). During the readout process, the electric field that defines a pixel is clocked, and the charge is moved towards an output capacitor capacitor where the charge signal is converted into a voltage (capacity = charge per voltage).
During an exposure, charge accumulates in a pixel. At some point, the electric field that defines a pixel cannot hold the charge in place, and when the charge is too high (i.e., the image overexposed), it will overflow (“blooming”) into neighbouring pixels. The amount of charge where this effect starts to become relevant is called “full well”, and is usually measured in the unit of number of electrons. For astronomical CCDs, the full well is of the order of fifty to a few hundred thousand electrons, and is a real physical limitation of a detector.
The full well defines how much light a pixel can sense before it saturates, i..e, overexposes.
The ADC dynamic range
The output voltage from the CCD detector is proportional to the charge that was in a pixel. This output voltage is usually amplified, and then fed into a analog to digital converter (ADC): The light received in a pixel will be converted into a computer-readable number. There are design choices to be made in a CCD controller when selecting the electrical parts:
- In general it is desirable that the the range of voltages from the CCD (e.g., 0 Volt output dark, 0.5 Volt when the full well capacity has been reached) is amplified to match the input range of the ADC part (e.g., 0 Volts to 5 Volts). Some CCD controllers allow to change this amplification to adopt to a range of CCDs or readout modes.
- Typically, ADC parts used in CCD controllers use 16 bits to represent the output number (0 to 65536). There are some controllers that can use 32 bit outputs, some use fewer bits (e.g., 14).
Ideally one would match the CCD output and amplification such that when there is no light, the ADC reports a small number, and the maximum number (e.g., for 16 bit, 65536) when the full well of a pixel is reached. It is possible, however, that a system was designed such that the dynamical range of the ADC is reached well before the full well was reached and vice versa - there are good reasons to do this, depending on the actual application.
The Gain
As we have seen above, the number output of an ADC is proportional to the number of electrons that were in a CCD's pixel, which was proportional to the number of photons detected. So:
Pixel Value [ADU] ∝ number electrons [e-]
The factor in this relation is called gain and has the unit of electrons per ADU (ADU = Analog Digital Unit) or e- / ADU.
Let's say that the full well capacity of a pixel in our CCD was 200000 electrons. One would design the CCD controller such that these 200000 electrons could be mapped into a range of a 16 bit number. That would lead to a gain of 200000 e- / 65536 ADU ~ 3 e- / ADU . Note that a 16 bit number has not enough resolution to properly sample the range of 200000 electrons!
Full well and gain for the 0.4m SBIG cameras
As of June 1st 2018, the SBIG cameras at LCO will operate in an unbinned mode. In that configuration the full well per pixel is of the order of 100,000 e-, and the gain is approximately 1.6 e-/ ADU. The best known value of full well and gain are captured in an image header in the keywords, for example:
GAIN = 1.6000000 / [electrons/count] Pixel gain
SATURATE= 124000.0000000 / [ADU] Saturation level
MAXLIN = 102000.0000000 / [ADU] Non-linearity level
Full well and gain in Calibrated data
All LCO imaging data are processed with the BANZAI calibration pipeline. As part of the process, the pipeline will multiply the images by their gain, and then set the GAIN header keyword to 1 e-/ADU. In the example above, for raw images one will find a GAIN of 1.6 e-/ADU and a saturation limit (SATURATE) of 64000 ADU. After processing, the counts in the images will be multiplied with the gain, the header keywords are GAIN=1 e-/ADU and SATURATE=102400 ADU. The maximum capacity of the detector pixels in units of electrons stays the same, it is just represented on a different scale in the processed image files.
2. How to choose a Signal to Noise
The relative error of a measurement is called Signal to Noise ratio, S/N. For the signal from a star, the noise is the square root of the signal (shot noise), i.e., the Signal to noise ratio would be Signal / Sqrt(Signal). In the following we will ignore other noise sources, such as detector noise, or systematic errors such as flat field errors.
Let's get a feeling for what S/N means: